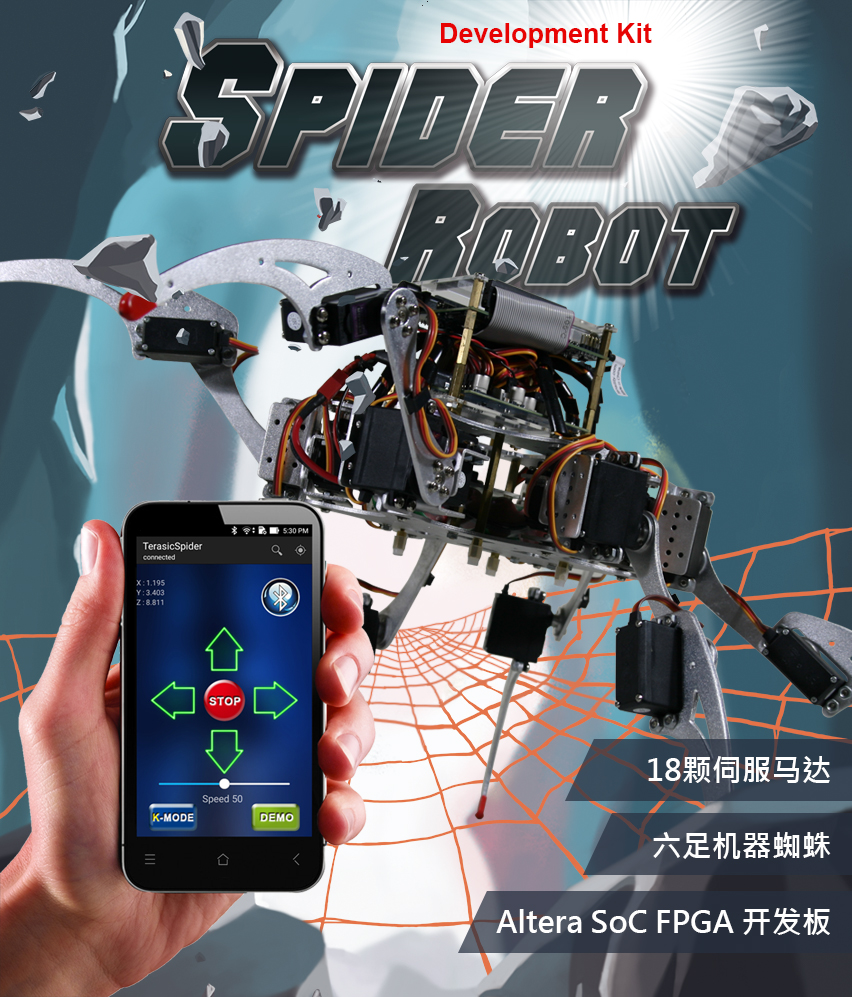
Terasic Spider 是一个由 18 个伺服马达所驱动的 6 足蜘蛛机器人。这些伺服马达受控于 Terasic spider 内嵌的 DE0-Nano-SoC 开发板。经由发送 PWM 控制讯号使 Terasic Spider 能运行各种动作。安卓设备可以透过蓝牙与 Terasic Spider 连接并进行远端操控。Terasic 开发的安卓 APP 软件可以控制 Terasic Spider 前进后退以及左右转.,也可利用安卓上的重力感应器数据,让蜘蛛与安卓设备同步摇摆,甚至可以完成预先定义好的一些跳舞动作。
Terasic Spider 所有源代码都是开源并可免费下载。您可以根据您的具体应用来修改源代码,以提高或者改变 Terasic Spider 的功能。源代码包括安卓工程,Linux 应用程序,以及一个 Quartus 工程。
请注意 DE0-Nano-SoC 开发板还拥有一个 2x20 pin 的扩展槽。你可以使用它自由的扩展其他功能,如相机,超声波传感器等。