(友晶新闻中心报导)
科技为现代人带来了许多生活上的便利,而科技在科学家及工程师的努力下日益求新。科学家们也一直努力开发机械器具及机器人,来协助节省人力及完成一些以人力较不可能完成的工作。但是许多机器人在目前的科技下,还是有一些盲点不能突破。像是改善机器人因为计算太慢造成的停顿现象,让其动作更流畅自然。
杜克大学的研究团队找到了一个改善机器人规划运动轨迹时停顿现象的方法,并成功地以友晶 DE5-Net FPGA 开发版实践这项研究计划,让机械手臂抓握的任务顺利进行,且这套系统的耗电量仅是原先的二十分之一。根据美国 IEEE Spectrum 报导,美国杜克大学先找出了机器人在运作时所有可造成碰撞的可能性,并利用客制化的处理器来处理在运动轨迹规划中最复杂的机械停顿的机率。而这项新发现将在未来工业机械规划上或机器人运作上产生重大的突破。
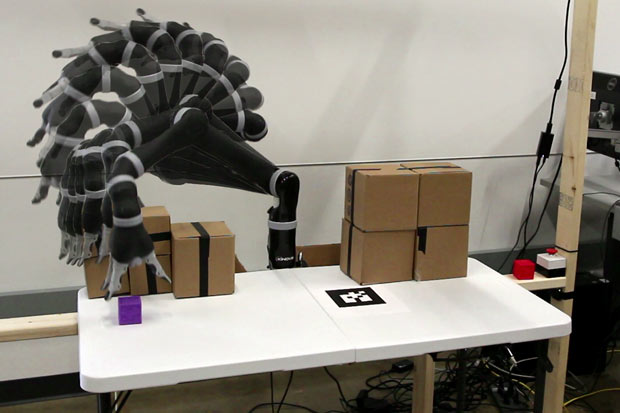 |
| Jaco 机械手臂以客制 FPGA 处理器做运动轨迹规划 (影像来源:Duke Robotics) |
在 IEEE Spectrum「Robot Motion Planning on a Chip」影片中有提到在做机器人运动轨迹规划时,首先建立出机率路线图。这路线图包含了无障碍物空间里的数个节点,以及节点间移动时不会造成碰撞的路线,最后在 PRM 上选出起点及终点。其中机器手臂移动时的活动空间亦有可能会发生碰撞的机会,所以也得将机器手臂的活动空间纳入计算考虑。这些步骤及计算都是有无比的挑战性,据一项研究显示,判断运动摆荡区域是否能避开碰撞,就耗掉「运动轨迹规划」99% 的运算时间。
FPGA 除了本身所具备的弹性及灵活性外还具有节省空间、省电、降低成本及稳定的优势,能够进行编程、除错、再编程和重复操作,因此能在设计与开发时不断的验证,确认其正确性。
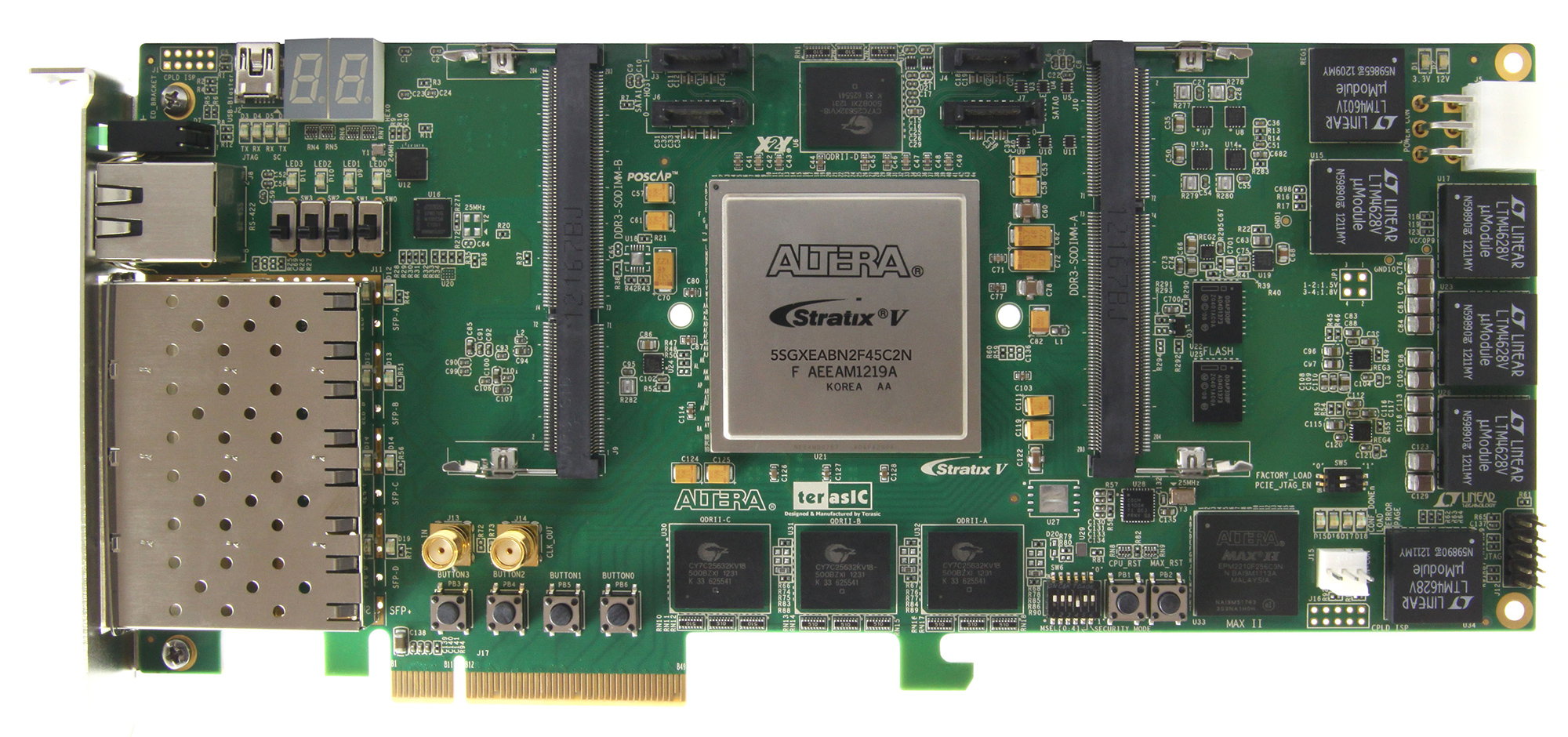
DE5-Net FPGA Development Kit
Terasic DE5-Net 除了应用于机器人的加速之外,也十分适合用于无延迟的事务、云端运算、高阶运算、数据、网络及讯号处理等应用。
DE5-Net 采用 Intel Stratix V GX FPGA,支持 PCI Express 3.0,四个外部 10G SFP+,无需依赖外部 PHY 即能加速网络应用。 (关于 DE5-Net 详尽信息请点击此链接 )
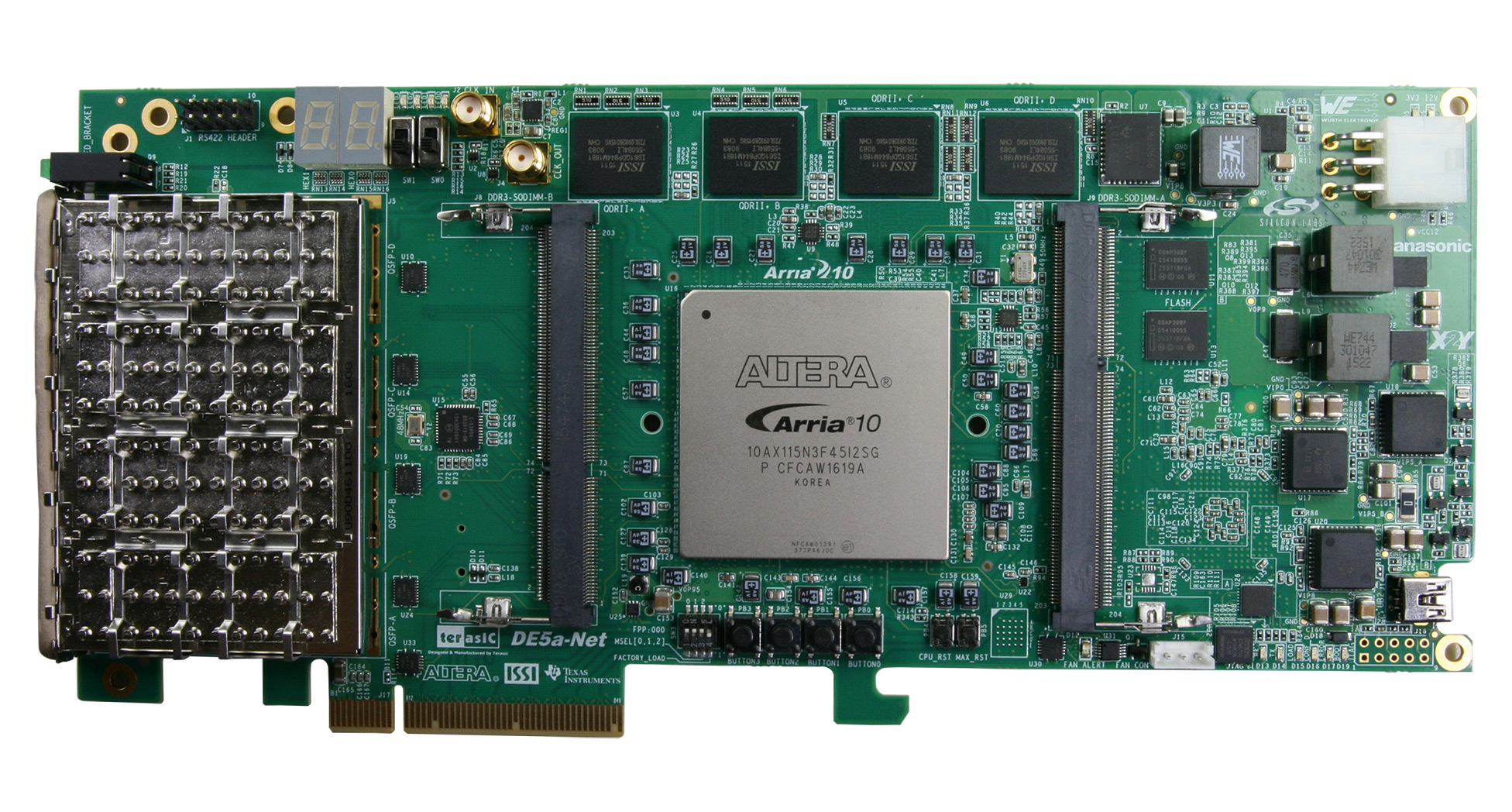
DE5a-Net Arria 10 FPGA Development Kit
对于更快速的网络通讯应用,Terasic 提供使用最新的 Arria 10 GX FPGA 的 PCI Express 开发板 DE5a-NET ,该卡提供四个 40G QSFP 通讯端口。(关于 DE5a-Net 详尽信息请点击此链接 )
Terasic 是协助您设计产品的最佳伙伴,如何为您的工程计划选择最佳的板子让您的设计能在最短的时间内达到最佳的成果,或对我们的产品有任何的疑问,都欢迎您与我们联系。e-Mail为: www.terasic.com.cn 。
(影片出处:IEEE )
相关连结
IEEE 原文报导:Motion-Planning Chip Speeds Robots